Aktywny Tempomat
Opis projektu
Projekt Aktywnego Tempomatu jest moim rozwinięciem zadania wykonywanego na przedmiocie Projektowanie Systemów Mechatronicznych. Do standardowej funkcjonalności aktywnego tempomatu dodaje on rozbudowany model symulujący pojazd z uwzględnieniem między innymi symulacji skrzyni biegów oraz krzywej momentu silnika.
Pliki projektu:
Badany problem
Omawiane zagadnienie przedstawia podstawową funkcjonalność aktywnego tempomatu czyli utrzymywanie ustalonej odległość od pojazdu jadącego przed nami.
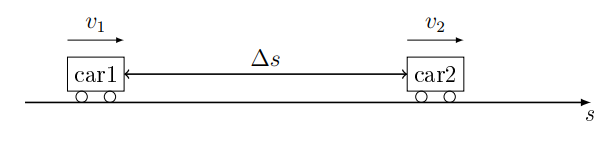
Odległość która ma zostać utrzymana między pojazdami (\(\Delta s\)) ustalana jest na podstawie oszacowania drogi hamowania pojazdu podążającego. Może to być wykonywane poprzez porównanie prędkośći z gotową tablicą porównawczą (LUT) i odczytanie owymaganej drogi hamowania, lub skorzystanie ze wzoru na drogę hamowania.
Działanie tego typu układów opiera się zwykle o czujnik radarowy lub LIDAR oraz układ mikroporocesorowy współpracujący ze sterownikami pojazdu w celu dokonywania korekty parametrów pracy silnika i układu hamulcowego. W przypadku omawianego modelu obliczenie dystansu między pojazdami spowadza się do określenia różnicy między przebytymi przez nie drogami od wspólnego początku układu odniesienia.
Artykuł w budowie